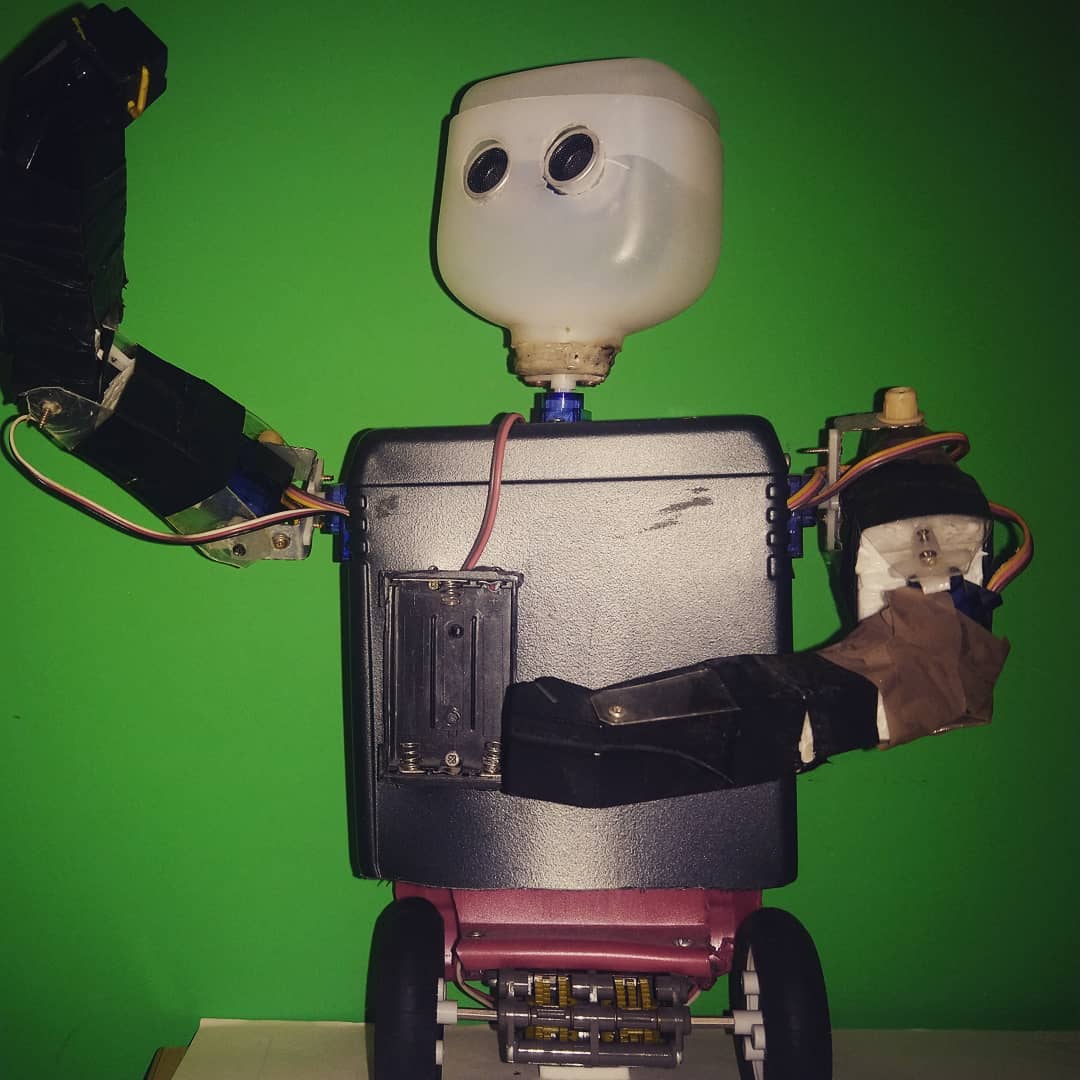
This is my second personal robot, my first humanoid in some ways (year 2013).
It is based on the Tamiya 70168 gearbox for moving, collected from my previous robot.
Since at the time 3D printing was prohibitive and I didn't have the chance to go to a FabLab, I used waste components.
Plastic sheets from cotton swab box, some wood, two scooter oil tanks and an hand soap box have been used for the chassis creation.
