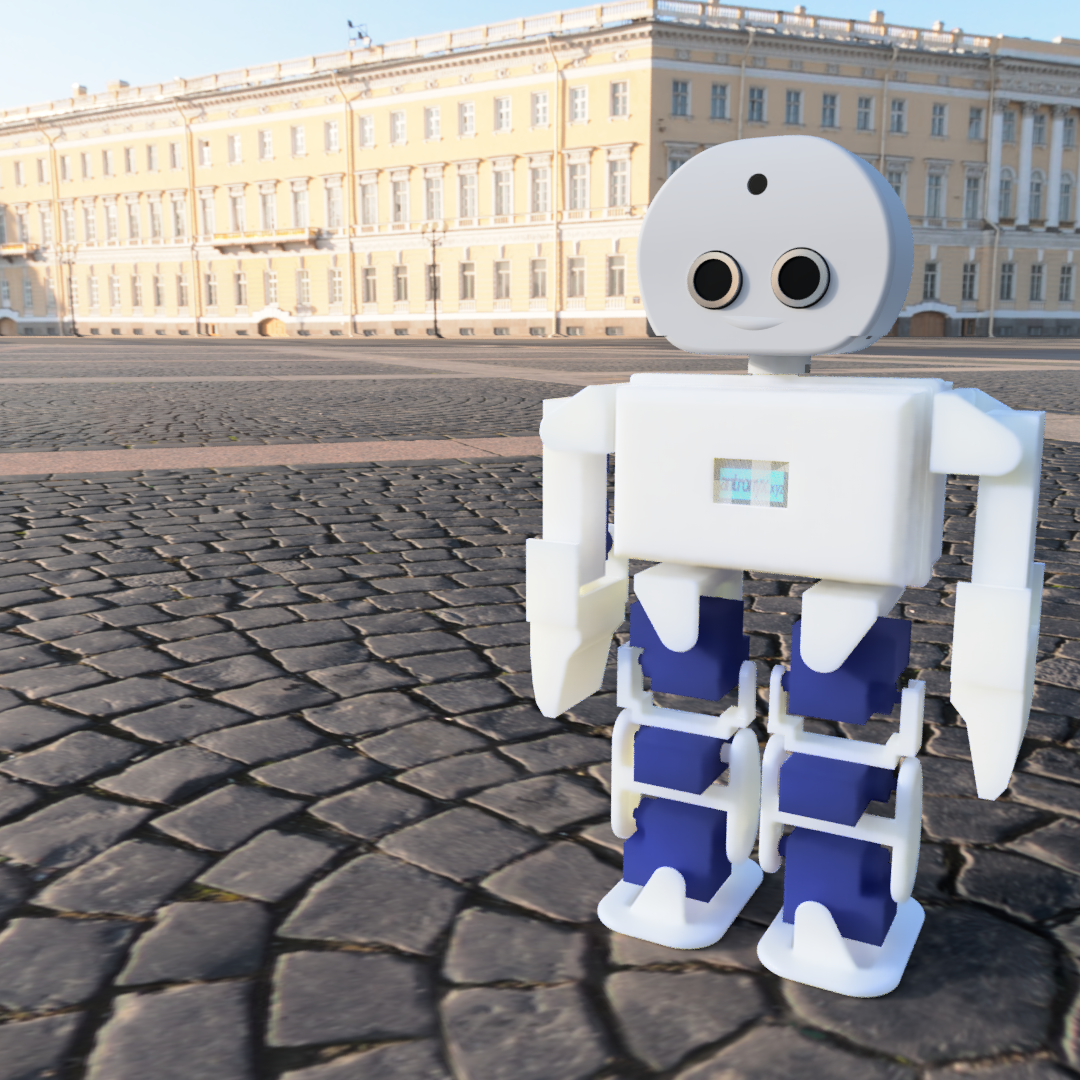
The goal is to make the cheapest humanoid robot with low-budget components.
STM32 "Blue Pill" board for controlling, SG90/MG90 servos, 3D printed PETG parts. Maybe a Raspberry Pi (or better the cheaper OrangePi) will added in order to implement ROS2.
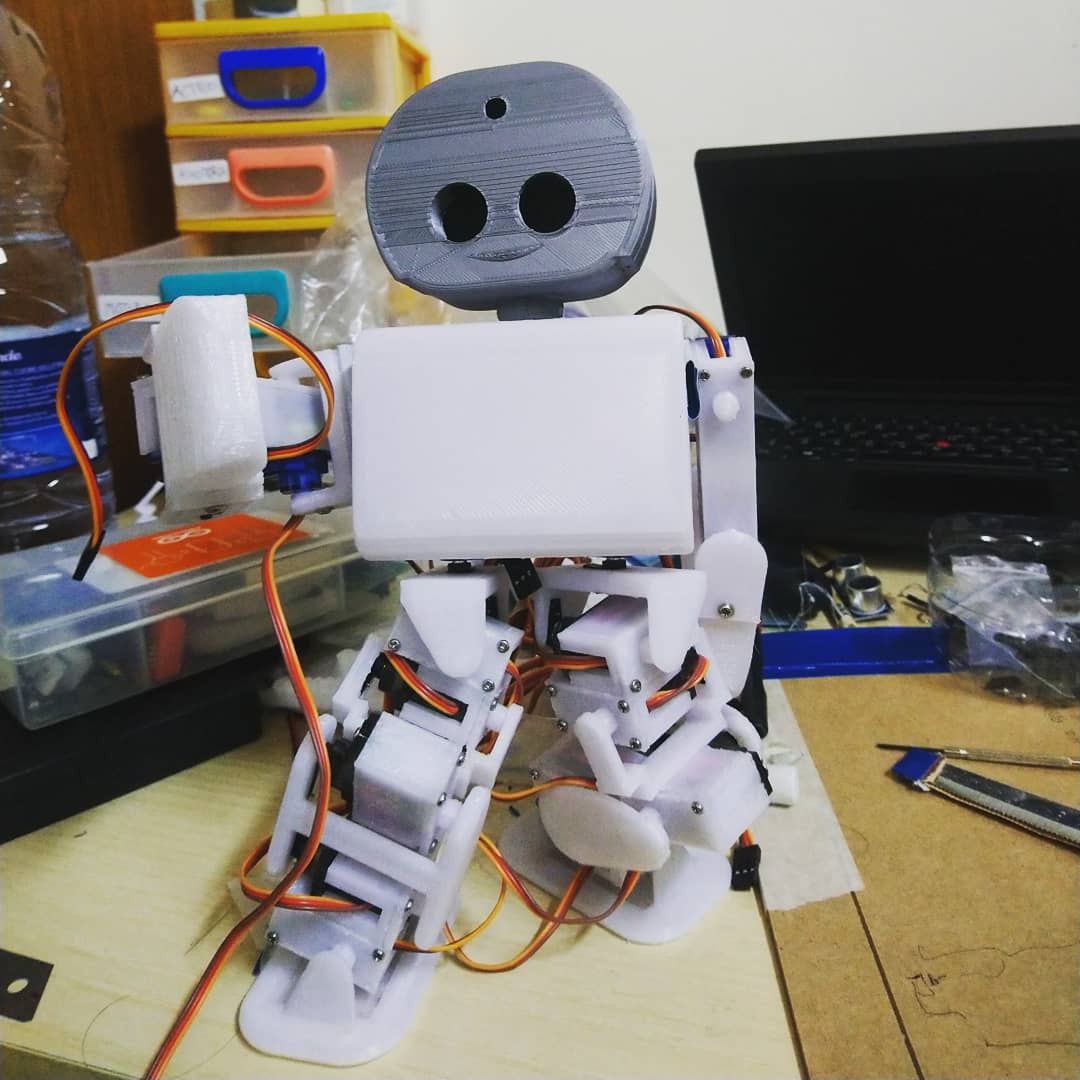
The electronic control board is under development, also the geometrical system.
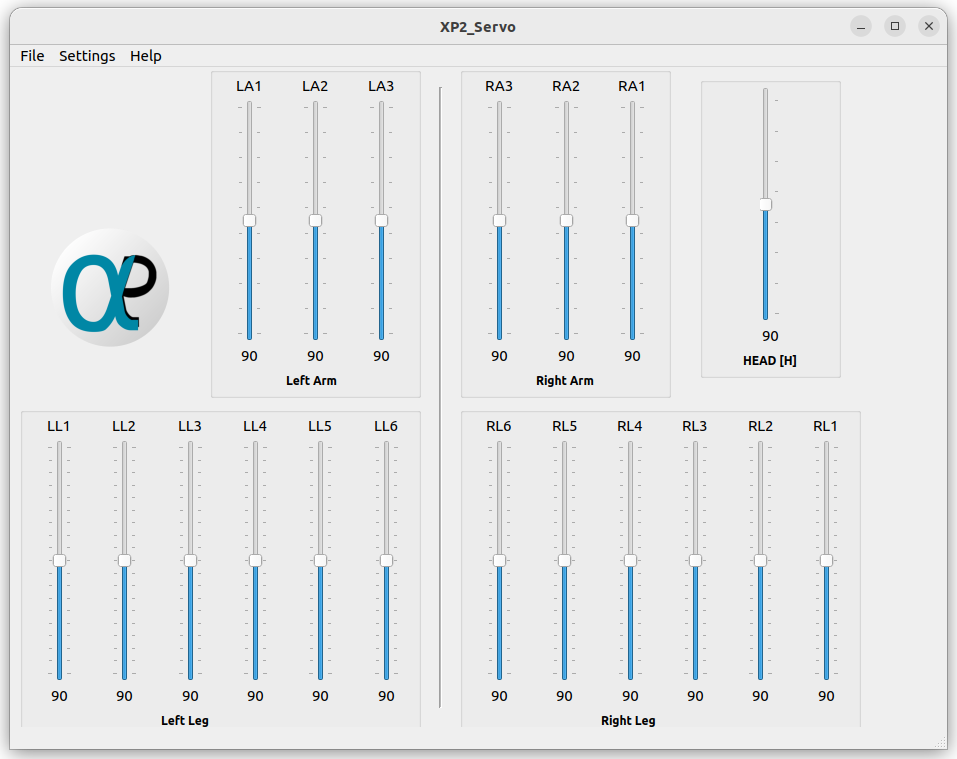
Currently the joints are controllable trought a PC software and a raw controller implemented on a stripboard.
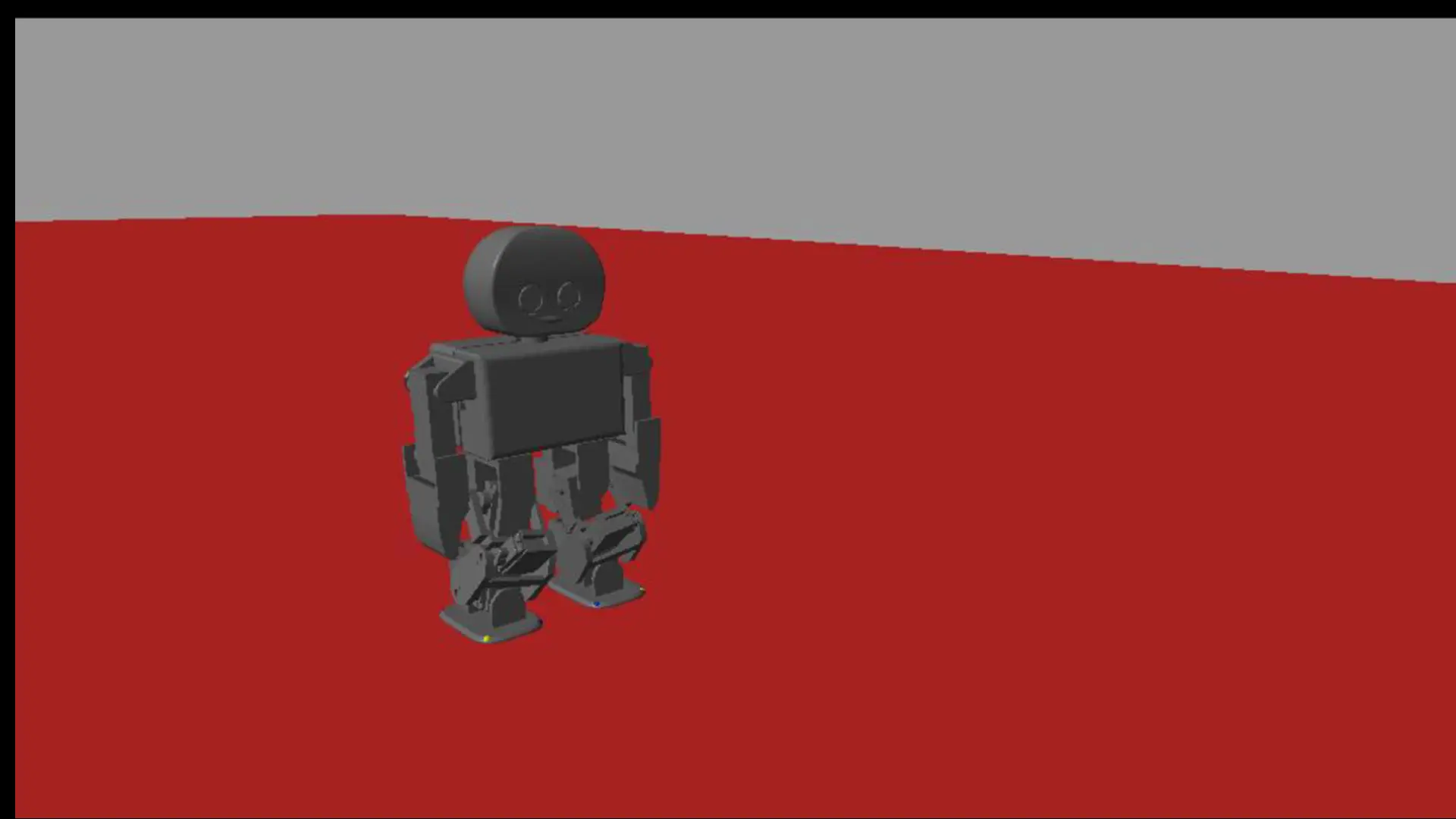
Using some inverse pendulum algorithms, inverse kinematics and a little bit of 🧙♂️, it's now possible to do some steps forward in a simulated environment.
It still takes a lot of effort to have a phisical working walking robot, hope all will go fine :)